Research
Projects & Publications
Explore Dr. Yinoussa Adagolodjo's research projects, publications, and contributions to robotics and healthcare technology.
Research & Innovation
Advancing the frontiers of medical robotics and intelligent healthcare systems
Research Domains
Explore research across different specializations
Research Philosophy
Bridging the gap between cutting-edge technology and real-world healthcare solutions
My research mission centers on developing real-time simulation tools and robotic systems that make minimally invasive procedures safer and more precise. By combining finite element methods, Cosserat rod theory, and constraint-based control with clinical insight, I work on soft & continuum robots, needle insertion guidance, and augmented reality overlays for the operating room.
Surgical Robotics
Precision robotic systems for minimally invasive procedures
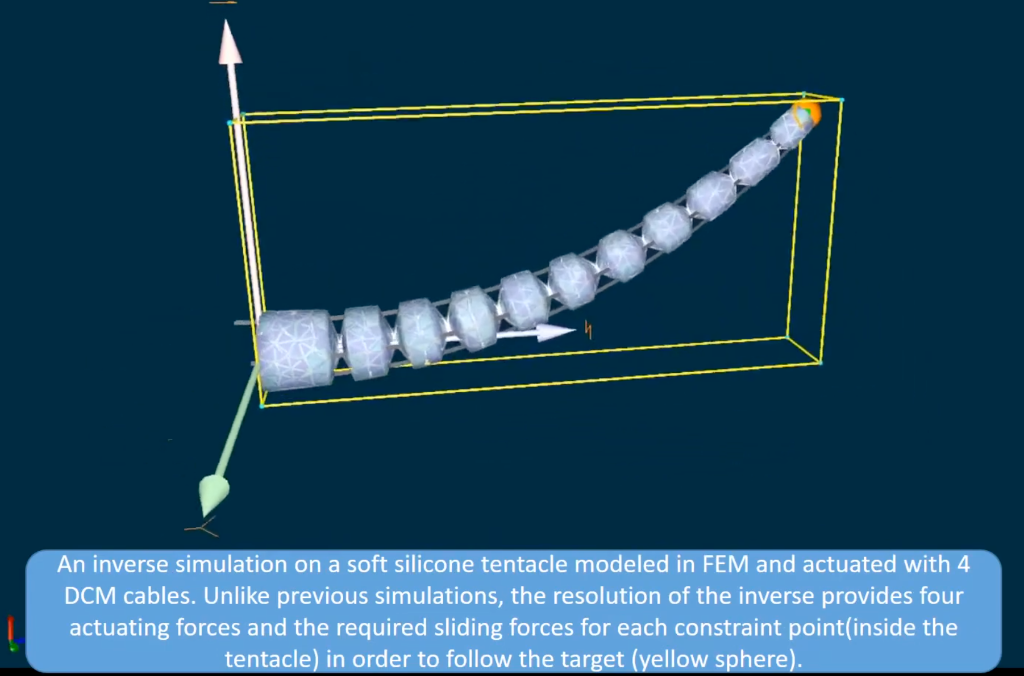
Real-time Simulation
Advanced FEM modeling for surgical planning and training
AR & Visualization
Immersive technologies for enhanced surgical guidance
Soft Robotics
Biomimetic systems for delicate medical applications
Research Journey
Key milestones and breakthroughs in my research career
Doctoral Research Excellence
CONECT Project - Pioneered robotic needle insertion techniques with advanced FEM simulation, laying the foundation for precision surgical robotics.
Post-doctoral Innovation
ROBOCOP Project - Revolutionized cochlear implant procedures through advanced robotization, improving patient outcomes and surgical precision.
Research Leadership
Contributes to several cutting-edge projects, including COSSEROOTS, IRE and ADAGIO, pushing the boundaries of soft robotics for medical applications.
Featured Research Projects
Exploring the intersection of robotics, AI, and healthcare innovation
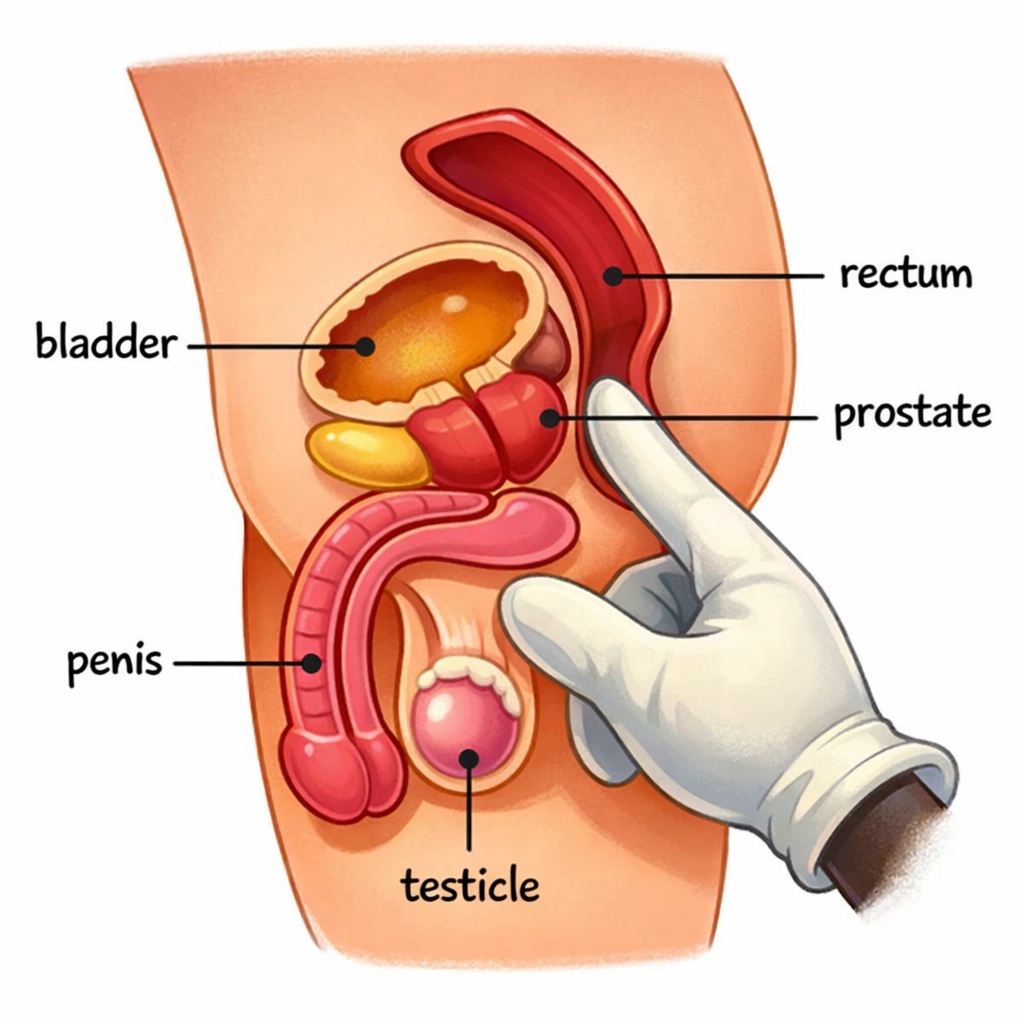
ProstateBot
Development of a pneumatically actuated active prostate phantom for training prostate biopsy robots and digital rectal examination (DRE) techniques. Design, modeling, and control of the robotic systems.

IRE Project
AI-powered soft robotic endoscopes and digital twins for safer, more effective minimally invasive procedures.
ADAGIO Project
Adaptive AI-driven tools and intelligent systems for complex medical interventions, designed to learn and adapt to diverse surgical environments.

Maestro
Design, modeling, and control of an advanced endoscope for robot-assisted SpiderMass — enabling in vivo real-time topography mass spectrometry imaging for minimally invasive surgery.
TAVI Growing Robot
Development of vine-inspired eversion growing robots for Transcatheter Aortic Valve Implantation (TAVI): design, modeling, and control for navigating complex cardiovascular anatomies.
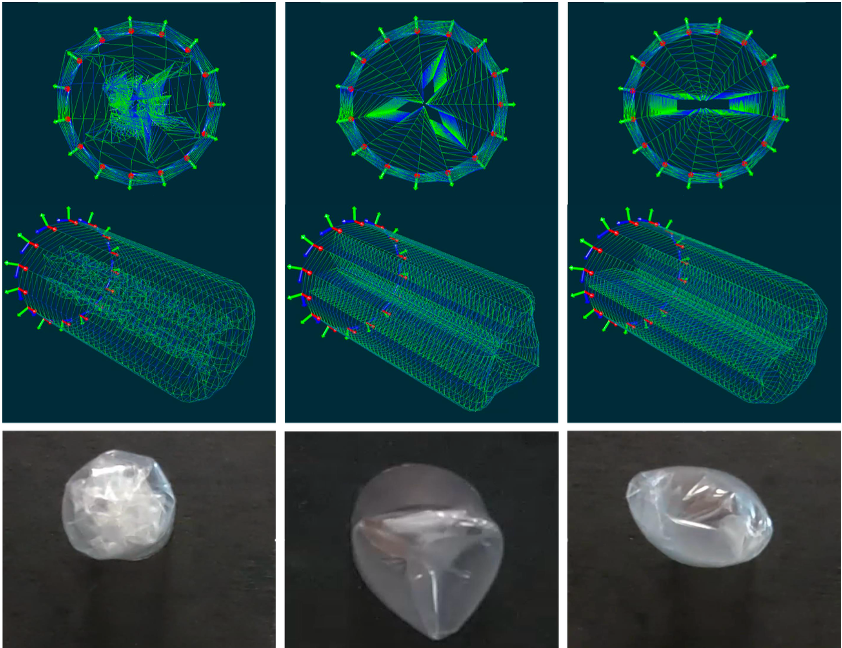
COSSEROOTS Project
Applying Cosserat's theory to advance control of slender deformable robots for medical and industrial applications.
ROBOCOP Project
Cochlear implant robotization project using advanced robotic assistance and precision surgical procedures to improve hearing technologies.

ACCESS
Development of a patient-specific digital twin to assist cochlear implant surgery: physical simulation of inner ear structures, medical image processing, and augmented reality for intraoperative guidance.
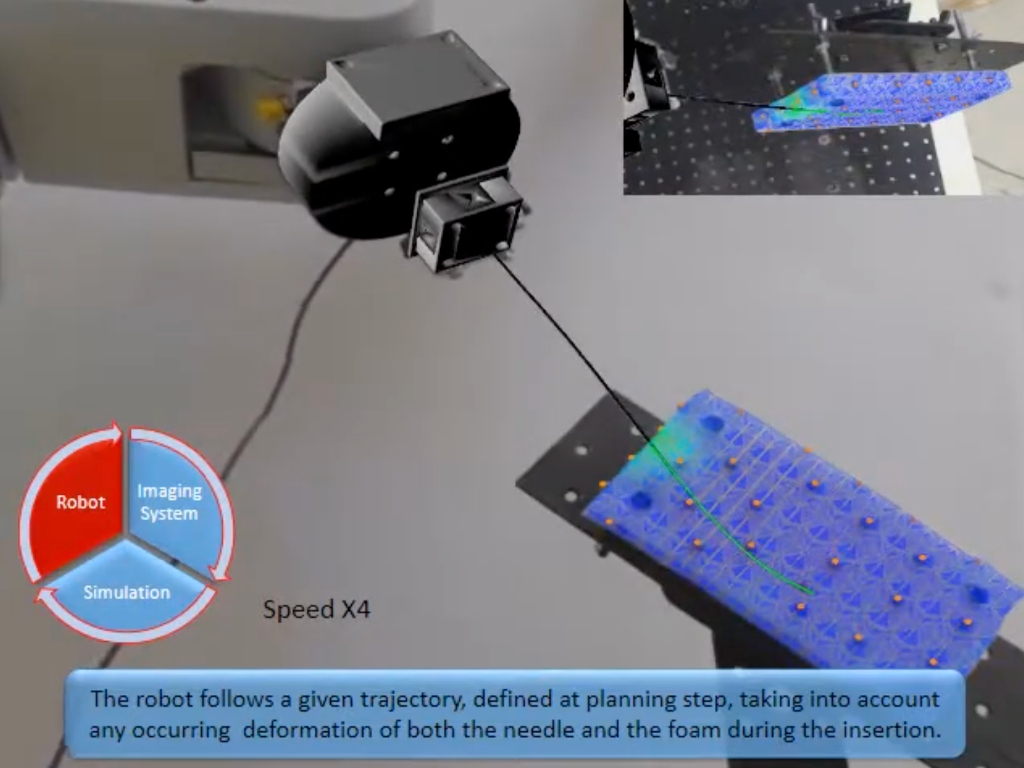
CONECT Project
Pioneering robotic integration in operating rooms for needle insertion precision, featuring finite element simulations and augmented reality guidance.
Research Impact & Recognition
Measuring the real-world impact of our research contributions
Recent Highlights
Key milestones and outputs from the lab
New ANR ADAGIO project
Kick-off of the ADAGIO project (ANR), developing an advanced robotic endoscope for SpiderMass in-vivo mass spectrometry imaging during minimally invasive surgery.
ROBOCOP — cochlear implant robotics
Active phase of ROBOCOP: robotization of cochlear implant insertion with force-feedback control and patient-specific digital twin (ACCESS sub-project).
IRE — smart robotic endoscopy
IRE project delivers AI-powered soft robotic endoscopes with digital twin technology for safer, more effective minimally invasive colonoscopy.
COSSEROOTS — Cosserat rod control
COSSEROOTS advances real-time control of slender deformable robots using Cosserat's theory, with applications in medical and industrial settings.
Collaborate with Us
Interested in collaborating on cutting-edge research projects? Let's explore opportunities to advance medical robotics and AI-driven healthcare solutions together.